Der RoboCup@Work ist ein internationaler Wettbewerb, um die Forschung und Entwicklung von Robotern für den Einsatz in der Industrie zu fördern. Jedes Jahr treten Teams gegeneinander an, zeigen ihren Stand der Technik und konkurrieren in verschiedenen Disziplinen. Die Herausforderungen sollen dabei als Grundlage für eine robuste und skalierbare Anwendung in einem größeren Maßstab dienen. Um die Aufgaben zu bewältigen, benötigt der Roboter Fähigkeiten in der:
Ich möchte euch in diesem Artikel die Arbeit meines Teams SWOT der FHWS näherbringen, wo ich den Aufgabenbereich Erkennung und Greifen übernehme. Als neues Team gewannen wir im RoboCup@Work 2021 den 4. Platz.
Im RoboCup@Work existieren verschiedene Tests. Diese reichen vom einfachen Transport von Objekten bis hin zum Platzieren von Gegenständen in dafür vorgesehene Aussparungen. Da mit uns das Team in der FHWS gegründet wurde galt es, zuerst den Basic Manipulation Test (BMT) zu bewältigen. Ein Ausschnitt des Tests ist im nachfolgenden Video zu sehen:
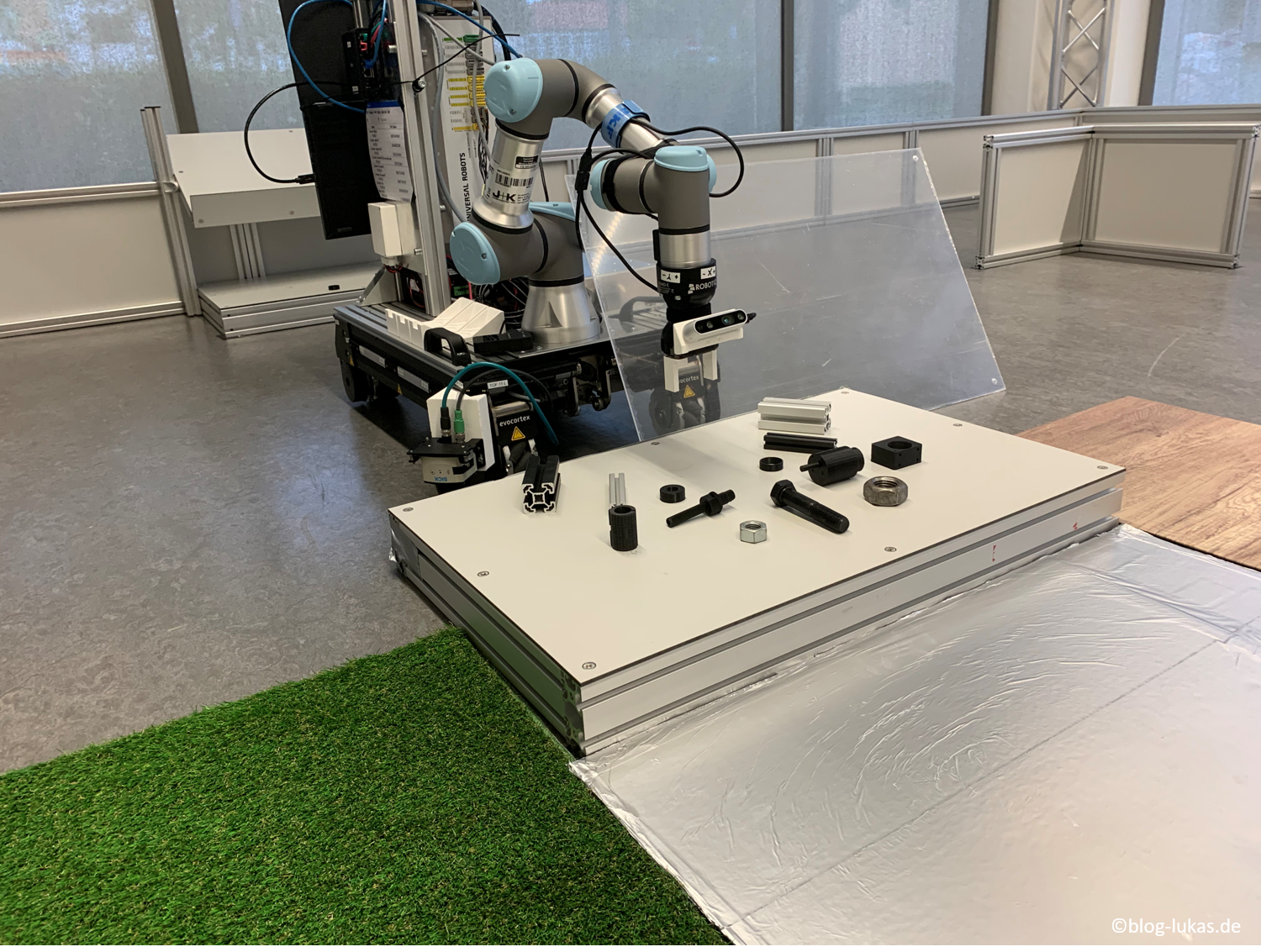
Der BMT prüft grundlegende Fähigkeiten wie die Navigation, Erkennen, Greifen, Platzieren und Drehen der Manipulationsobjekte. Ziel ist der Transport einer Gruppe von Gegenständen unterschiedlicher Größe und Form von einem Quellbereich in einen Zielbereich. Dafür müssen die Arbeitsbereiche immer mindestens einmal angefahren werden. In den unterschiedlichen Stufen des BMT werden zudem diverse Untergründe (bspw. Holz, Gras, Plexiglas), Drehtische, Regale, Dosen und Köder-Objekte eingesetzt. Die Gewichtung der zu erreichenden Punkte kann im RoboCup@Work Rulebook 2021 nachgelesen werden.
Der Roboter besteht aus verschiedenen Komponenten. Zur Navigation werden zwei Lidar Sensoren (TIM561), montiert an einer mobilen Plattform von der Evocortex GmbH eingesetzt. Diese ermöglichen die Lokalisation des Roboters in der Umgebung. Die Plattform kann sich durch die Mecanum-Räder omnidirektional auf dem Boden bewegen und so auch in engen Bereichen manövrieren.
Der kleine, kollaborative Roboter UR3e von Universal Robots ist als Roboterarm zusammen mit der Controllerbox und der Hand-E von Robotiq auf der mobilen Plattform montiert. Mit diesem Setup können Objekte in einer Entfernung von bis zu 50 Zentimeter gegriffen, aufgehoben und platziert werden, was für die @Work Liga ausreicht. Die auf dem Greifer montierte Intel RealSense D435i liefert RBD-D Datenströme und sorgt für die 3D-Wahrnehmung. Alle Softwarekomponenten laufen aktuell auf dem Intel UP Xtreme, dem Jetson TX2 im Evocortex sowie auf dem ThinkPad von Lenovo.
Unser System läuft auf Ubuntu 18.04 im Robot Operating System (ROS) mit der Version Melodic. Aktuell kann die Software in vier Komponenten unterteilt werden. Diese sind:
Der Aufgabenplaner ist für die Analyse, Sortierung und Überwachung der verschiedenen Aufgaben zuständig, die von der RoboCup Schiedrichterbox übermittelt werden. Durch einen Parser werden die Daten konvertiert. Anschließend berechnet ein Scheduler erforderliche Bewegungs-, Erkennungs-, Greifaufgaben und sortiert diese für eine effiziente Ausführung.
Die Navigation erkennt die aktuelle Position und navigiert die Plattform zwischen den Arbeitsbereichen. Mithilfe eines globalen Planers und dem Adaptive Monte-Carlo-Algorithmus schätzt der Roboter seine aktuelle Position auf einer vorher aufgenommenen Karte. Eine lokale Karte zeigt das wahrgenommene Umfeld des Roboters. Mit Hilfe der Timed Elastic Band Methode werden mögliche, kollisionsfreie Pfade aufgrund der Daten der lokalen und globalen Karte berechnet.
Die Erkennung und Bestimmung der Pose erfolgt über konventionelle Algorithmen und der Point Cloud Library (PCL). Zuerst wird die Szene mithilfe der auf dem Greifer montierten Kamera gescannt und rekonstruiert. Eine lokale Pipeline analysiert die Topologie der Szene und vergleicht diese mit einem vorher eingescannten Modell. Dabei wird dafür gesorgt, dass sich die z-Achse des Modells immer in der Mitte des Objektes befindet. Zum Ablegen wurde ein Moving Windows Verfahren implementiert, welches freie Positionen auf der Ablage sucht.
Anhand der gewonnen Pose, der z-Achse und den Daten über das Objekt wird schließlich ein Greifpunkt bestimmt. Dieser Punkt wird von oben senkrecht angefahren. Das cartesian_ros_contol Paket übernimmt dabei die Bahnplanung. Wird das Ziel erreicht oder tritt eine Kollision auf, schließt der Greifer und das Objekt wird zur Ablage transportiert.
Die für die @Work Liga entwickelten Anwendungen befassen sich mit einer breiten Palette von Aufgaben in der Industrie. Mit dem entwickelten, modularen System können aber auch Aufgaben im medizinischen oder privaten Bereichen bewältigt werden. In unserer Hochschule für angewandte Wissenschaften Würzburg-Schweinfurt werden auch bspw. die entwickelten Anwendungen in der Ausbildung eingesetzt.
Ich habe euch hier einen kurzen Überblick zum Stand der Entwicklung des Teams SWOT für die Teilnahme am RoboCup@Work 2021 beschrieben. Diese Informationen zeigen u. a. Aufgaben in der Navigation, Objekterkennung, Manipulation und Planung mit unserem aktuellen Aufbau. Weitere Informationen könnt ihr auf der Homepage meines Teams SWOT finden.
Falls ich euch das Thema schmackhaft machen konnte und ihr jemand kennt, der demnächst ein Masterprojekt an der FHWS (M. Eng. Elektro- und Informationstechnik) sucht, könnt ihr mich gerne anschreiben. Wir suchen immer motivierte Mitarbeiter, welche sich mit Roboterthemen auseinander setzen möchten.